Technický popis laboratoře




Výstupem projektu, realizovaného na katedře KPV, je laboratoř označená jako „Laboratoř digitální fabriky“, do které byla pořízena zobrazovací technika, speciální projekční zařízení a laboratorní technika pro tvorbu virtuálního 3D zobrazení pro technickou podporu praktické výuky a experimentální činnosti studentů.
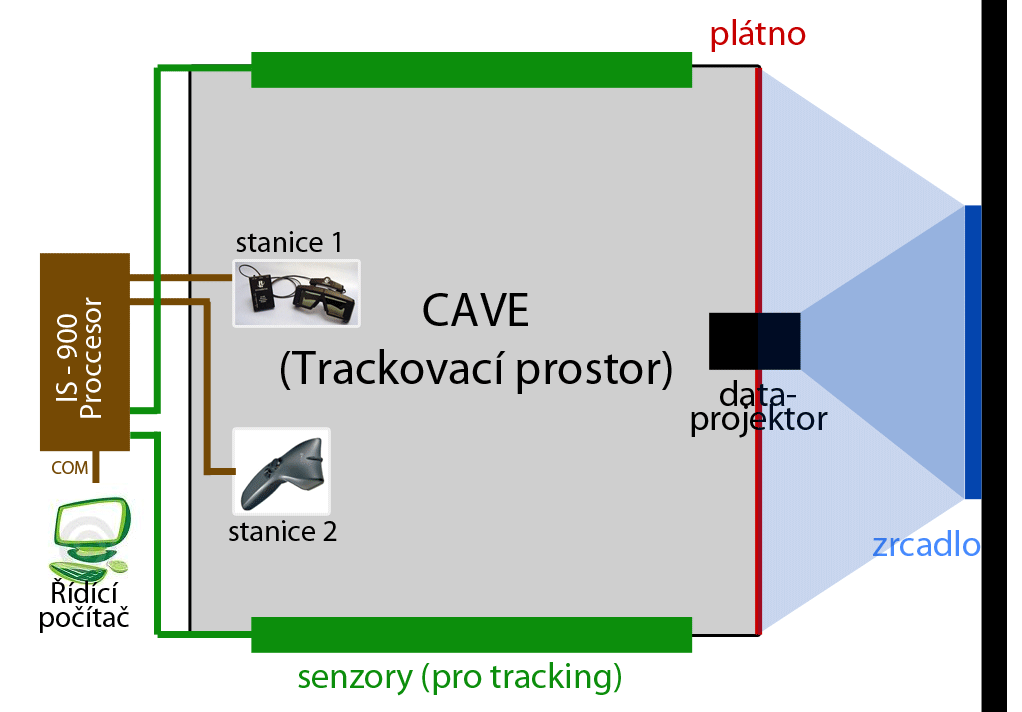
Schéma zapojení Laboratoře digitální fabriky na KPV
Za účelem ušetření konstrukčního prostoru a aplikaci trackovacího zařízení, byla zvolena zadní projekce. Data projektor je nasměrován směrem od projekčního plátna na stěnu, kde je umístěno speciální zrcadlo, které odráží obraz směrem na plátno. Vše musí být správně kalibrováno. Poměr stran plátna je 16:10. Obraz je zobrazován v HD rozlišení, tj. 1280x720 při 120Hz. Kvůli této vysoké frekvenci musel být zvolen speciální diaprojektor, který zobrazování při této frekvenci umožňuje.
Vlastní CAVE pak zahrnuje konstrukci, k níž jsou připevněny senzory, které sledují pohyb stanic na "fly sticku" a na brýlích pozorovatele.
Jak jednotlivé vybavení laboratoře vypadá si můžete prohlédnout na následujících fotografiích.
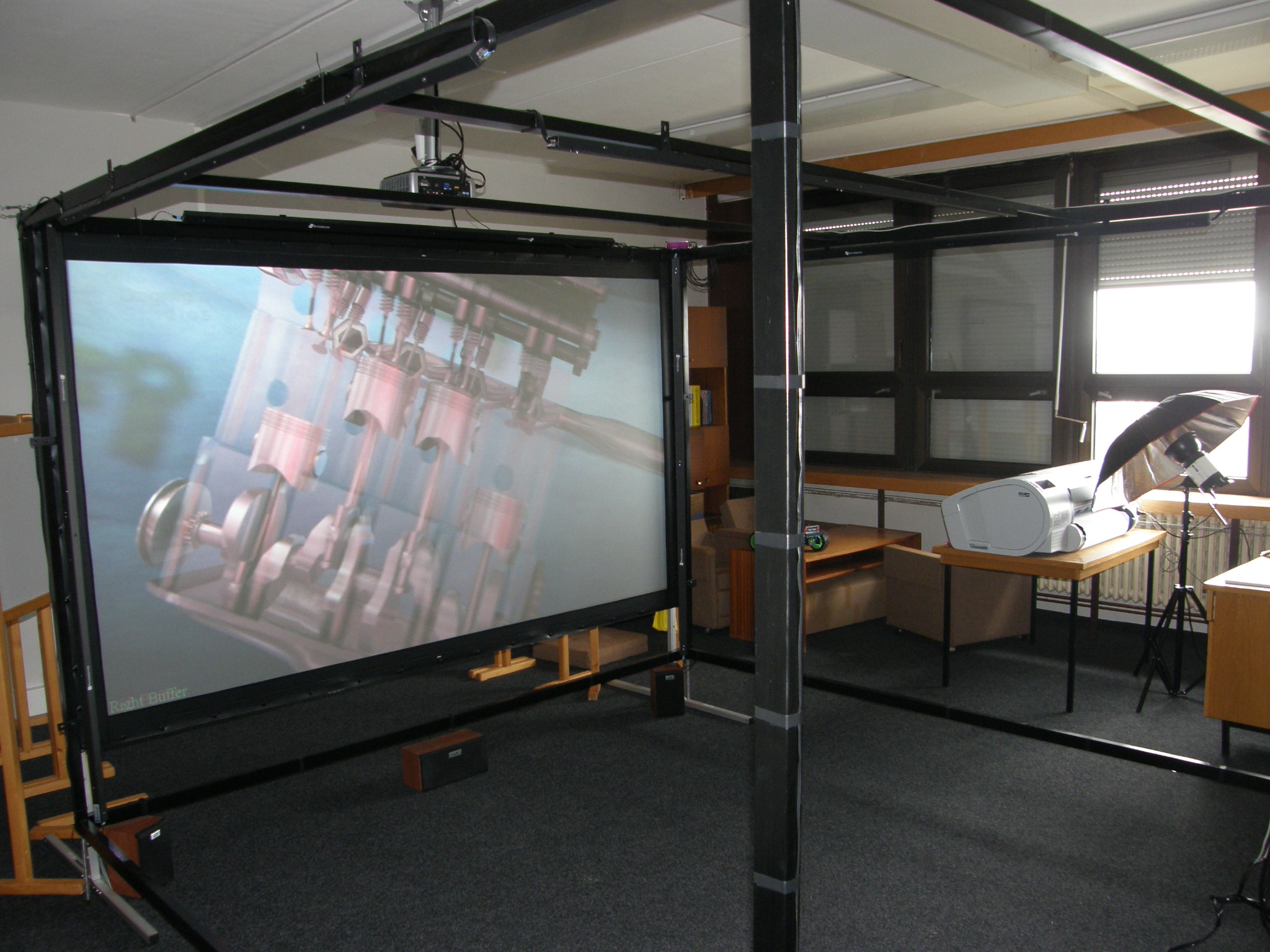
Pohled do CAVU na KPV
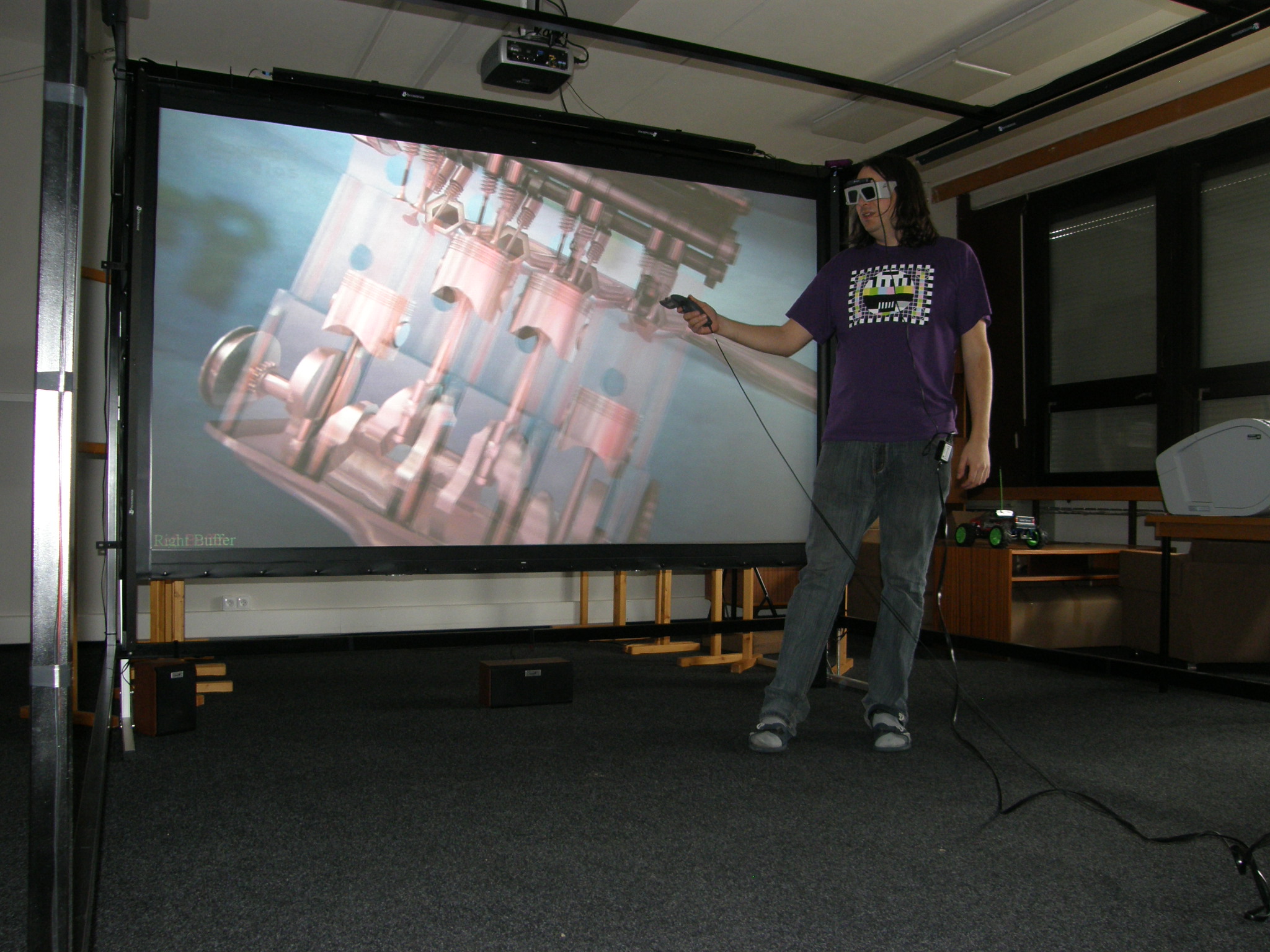
Pozorovatel s trackovacím zařízením a aktivními stereoskopickými brýlemi v CAVU
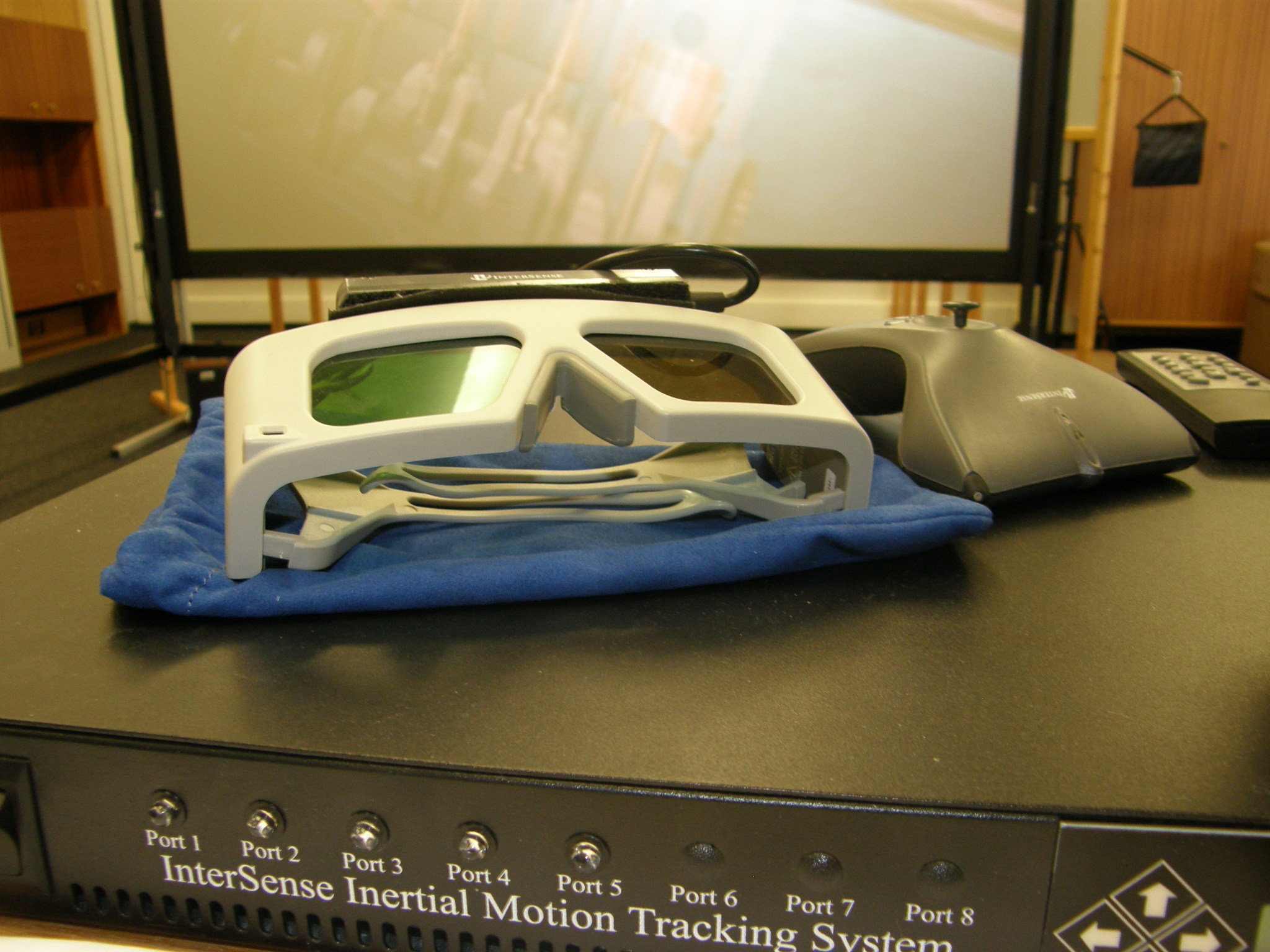
Trackovací zařízení a aktivní stereoskopické brýle obsluhy CAVU

Montáž 3D stereoskopického projektoru

Zrcadlo zajišťuijící zpětnou projekci

Aktivní stereoskopické brýle pro studenty
Laboratoř se též začíná rozrůstat o další vybavení. Jedná se o světla pro rozšířenou realitu nebo například haptické pomůcky. Tyto pomůcky slouží pro zvýšení tzv. pocitu proniktnutí do virtuálního prostoru (immersion). Pomocí těchto pomůcek může být přenesen pohyb uživatele na digitální modely (mock up). Tyto techniky se používají hlavně pro tréninkové aplikace - přenesení pohybu rukou chirurga na operační nástroje (Omni Phantom), nebo montážní postupy (data glove), kdy je přenášen pohyb rukou dělníka na digitální model člověka.

Haptická pomůcka - Omni Phantom - hmatové zařízení pro manipulaci s virtuálními objekty

Haptická pomůcka - Data Glove 5 Ultra - rukavice pro Motion Capter (Zdroj: www.5dt.com)




